

Robotic blimps, as lighter-than-air aerial platforms, offer extended operational duration and enhanced safety in human-robot interactions due to their buoyant lift. However, achieving robust flight performance under environmental airflow disturbances remains a critical challenge, thereby limiting their broader deployment.
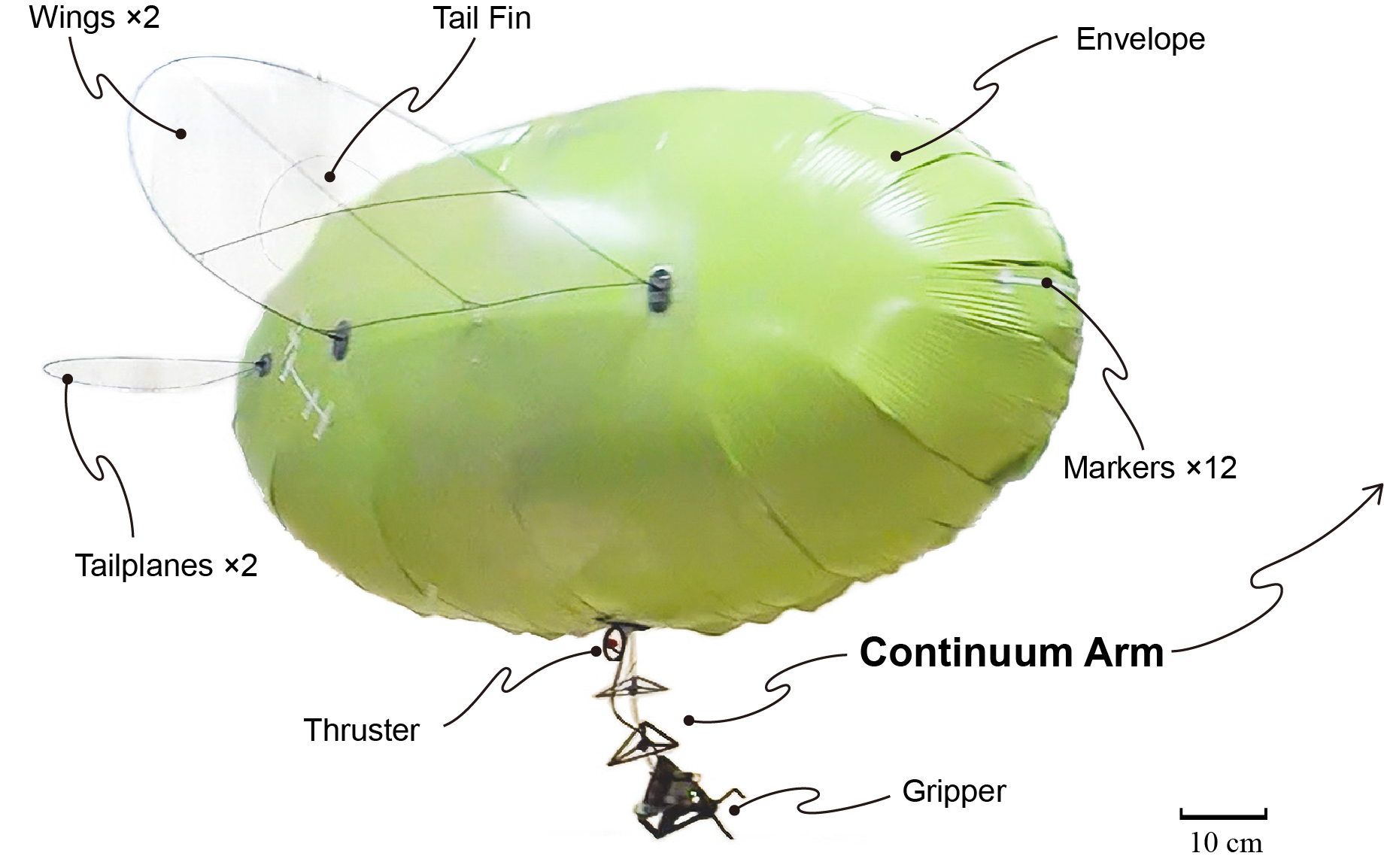
Inspired by avian flight mechanics, particularly the ability of birds to perch and stabilize in turbulent wind conditions, this article introduces RGBlimp-Q--a robotic gliding blimp equipped with a bird-inspired continuum arm featuring a novel moving mass actuation mechanism. This continuum arm enables flexible attitude regulation through internal mass redistribution, significantly enhancing the system's resilience to external disturbances. Additionally, it facilitates aerial manipulation by employing end-effector claws that interact with the environment in a manner analogous to avian perching behavior. This article presents the design, modeling, and prototyping of RGBlimp-Q, supported by comprehensive experimental evaluation and comparative analysis. To the best of the authors' knowledge, this represents the first interdisciplinary integration of continuum mechanisms into a lighter-than-air robotic platform, where the continuum arm simultaneously functions as both an actuation and manipulation module. This design establishes a novel paradigm for robotic blimps, expanding their applicability to complex and dynamic environments.
We have open-sourced the RGBlimp-Q hardware and code on GitHub.
@article{cheng2025rgblimp,
title = {{RGB}limp-{Q}: {R}obotic {G}liding {B}limp with Moving Mass Control Based on a Bird-Inspired Continuum Arm},
author = {Cheng, Hao and Zhang, Feitian},
journal = {IEEE Transactions on Robotics (T-RO)},
year = {2025}
}